01/ 06
VR INDUSTRIAL TRAINING MODELS
Lead Modeler & Integration Engineer
Afribot Robotics
Aug 2025 — Jan 2026
Led the modelling team and acted as the bridge between the design and development teams — taking SOLIDWORKS models from designers and wiring them up as interactive objects in Unity for the VR dev team.
- Led the modelling team, owning geometry accuracy and scale fidelity across the SOLIDWORKS library.
- Bridged the design and development teams: prepared and imported SOLIDWORKS models into Unity and authored the C# interaction scripts the VR devs built on.
- Defined the asset hand-off pipeline (naming, pivots, scale, LODs) so modellers and devs could ship in parallel without rework.
LeadershipSOLIDWORKSUnityC#VRPipeline

FIG. 01 — VR HEADSET DEMO SESSION01 / 02
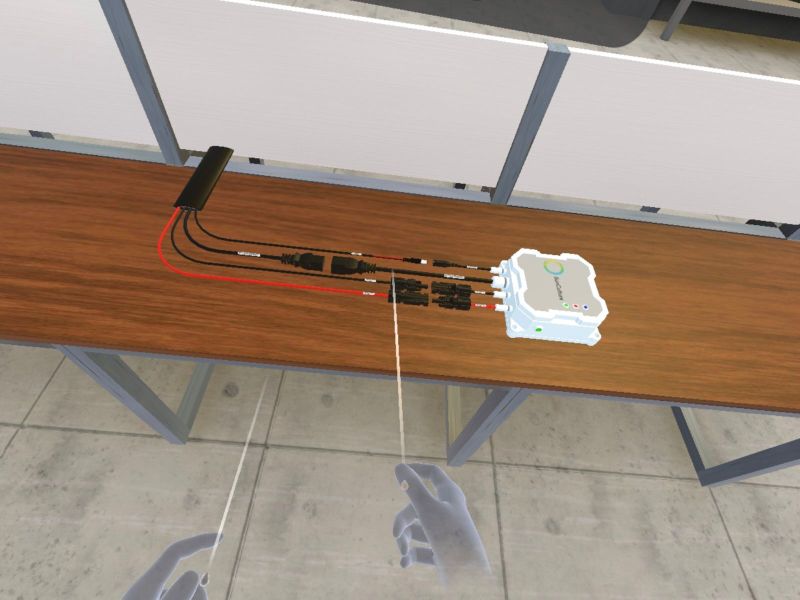
FIG. 02 — IN-HEADSET WIRING TASK02 / 02
01 / 02